DynamicStudio v6.4发布
DynamicStudio v6.4中增加了Rigid Object Tracking and Stabilization功能,合并了POD与BOD功能,并修正了Shadow与PIV叠加显示时Shadow结果错位的Bug。
Rigid Object Tracking and Stabilization (ROT/ROS)
ROT/ROS图像稳定算法常用于手机相机(部分电子防抖采用类似算法),在PIV中我们可以使用该算法补偿由于相机振动引起的系统误差;也可以用于将欧拉坐标系转换为拉格朗日坐标系。
例如在研究纺锤水蚤游动时周围水流速度场时,可以将坐标系转换为相对水蚤的水流流速。进而可以进行相位分析及锁相重构。
原始速度场:
锁相重构后的速度场:
或者在研究微通道内两相流流动时,对水相液滴内的速度场进行测量:
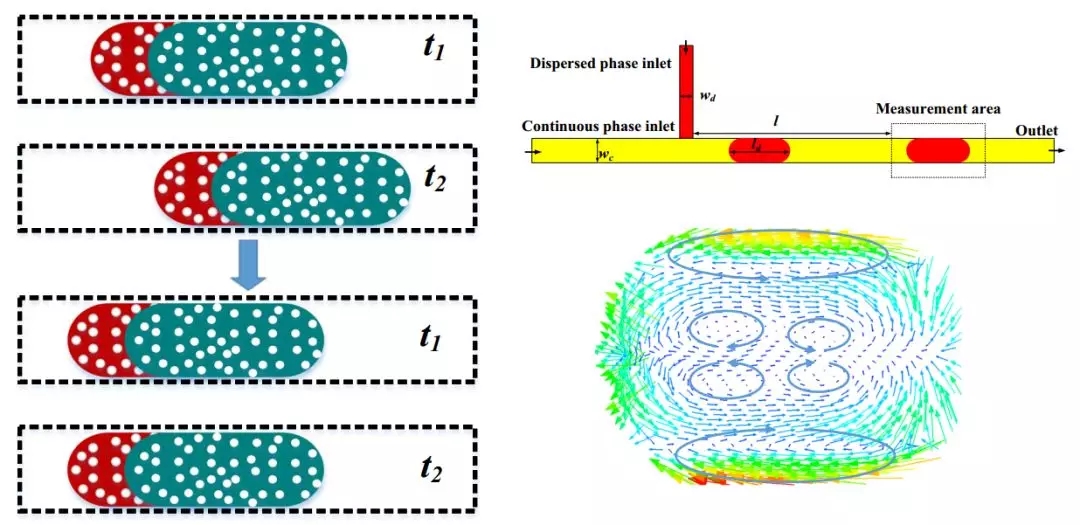
Liu Z, Zhang L, Pang Y, et al. Micro-PIV investigation of the internal flow transitions inside droplets traveling in a rectangular microchannel[J]. Microfluidics and Nanofluidics, 2017, 21(12): 180.
POD功能与BOD合并
在最新的POD功能中,我们合并了早先的POD与BOD功能,使POD不仅可以分析流动的相干结构,并且引入了空间模态Topos及时间模态Chronos:
The Topos describes spatial variations and are independent of time.
The Chronos describe how each of the modes contribute to the reconstruction as a function of time. These are independent of spatial locations.
详情请参阅《Spatiotemporal Data Analysis - Reference Manual》
Shadow与PIV叠加显示
在此次发布的版本中,我们修正了早期Shadow与PIV结果叠加显示时shadow结果错位的bug。值得一提的是,我们不仅可以叠加显示不同的参量测量结果,并且我们可以使用Dynamic Mask,通过Wall Windowing算法对PIV近壁速度进行修正,获得更加精确的速度场分布。